That patent mentions the need for a sun gear. Not sure it's exactly the same since this one doesn't.
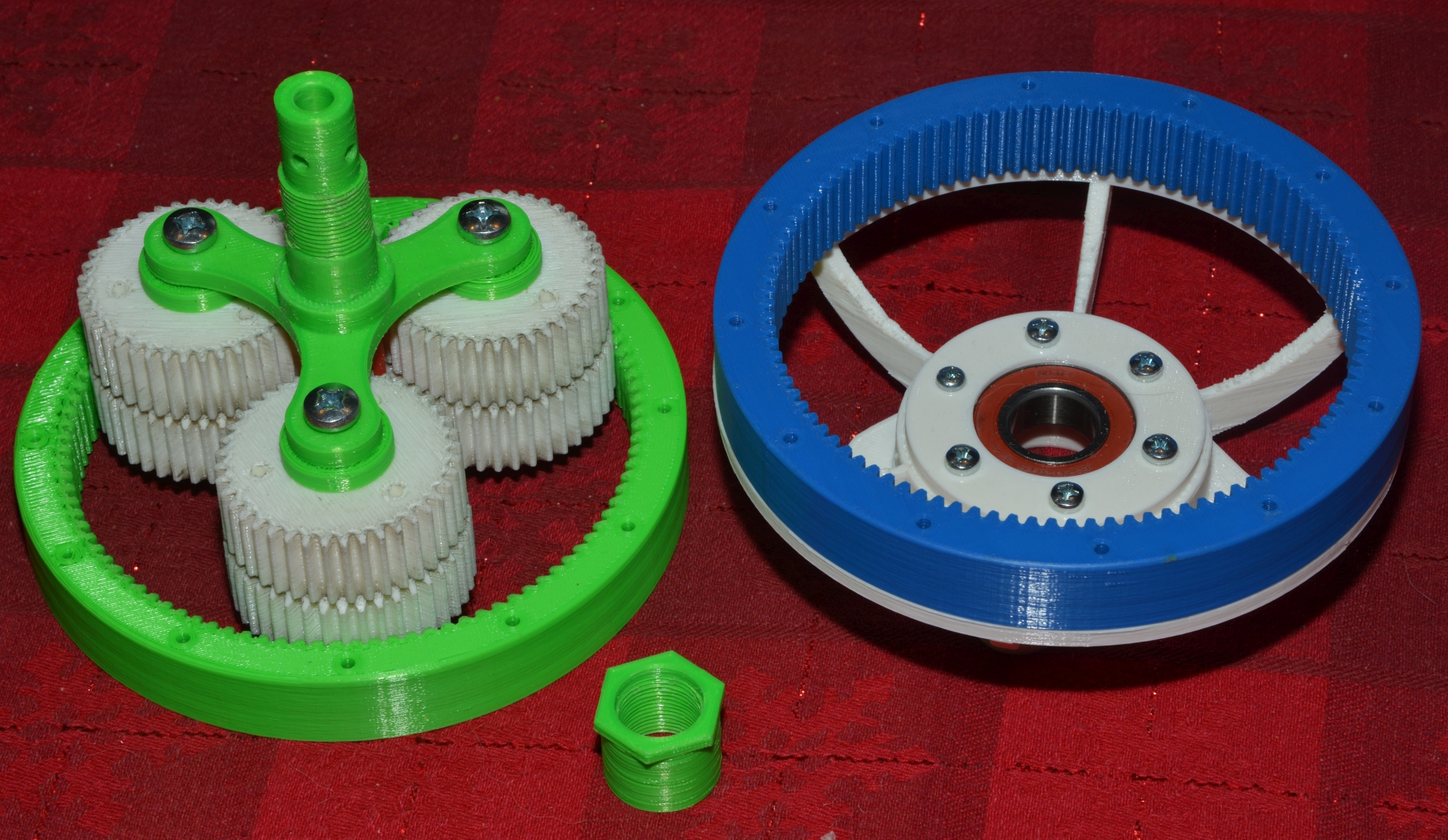
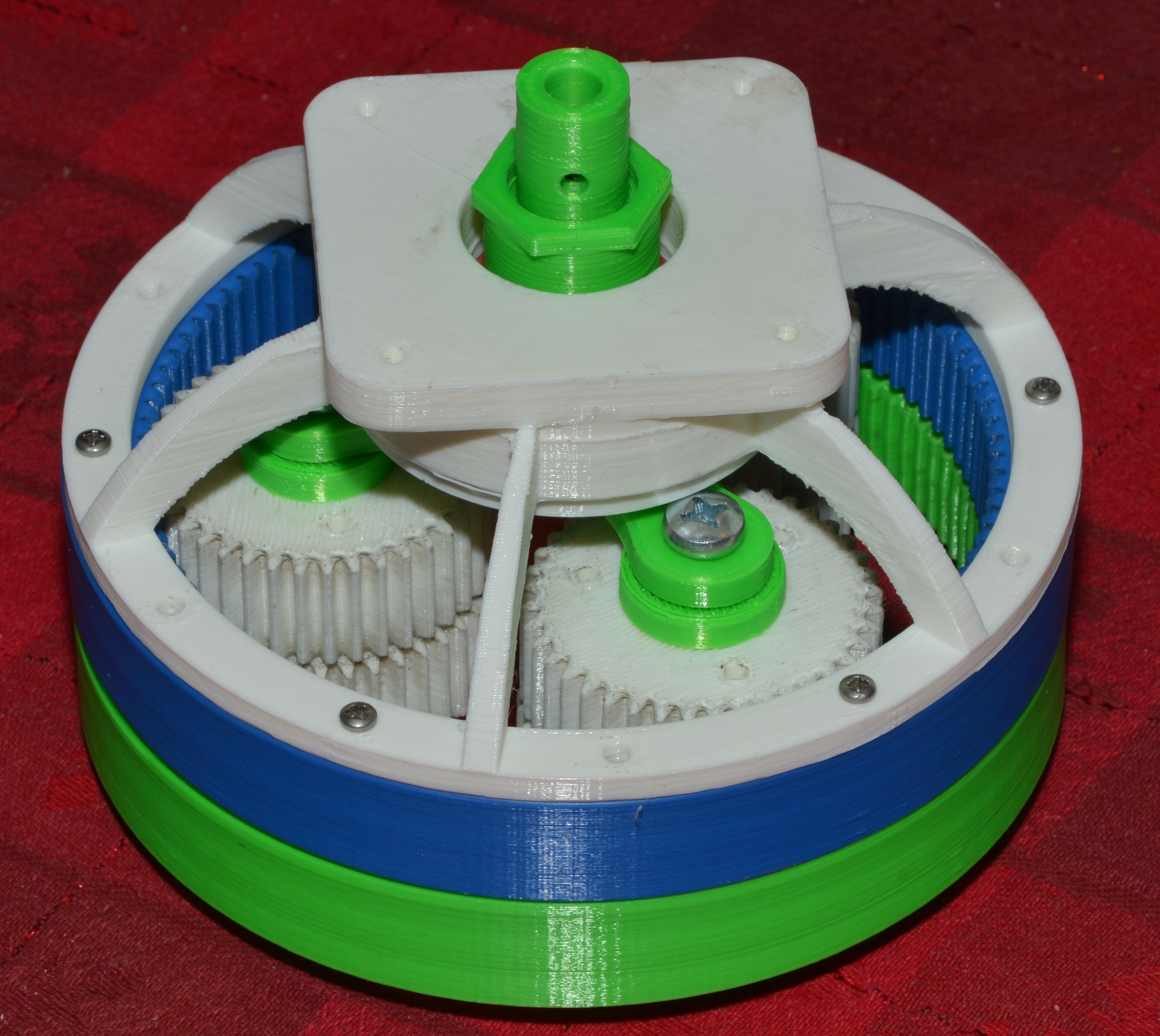
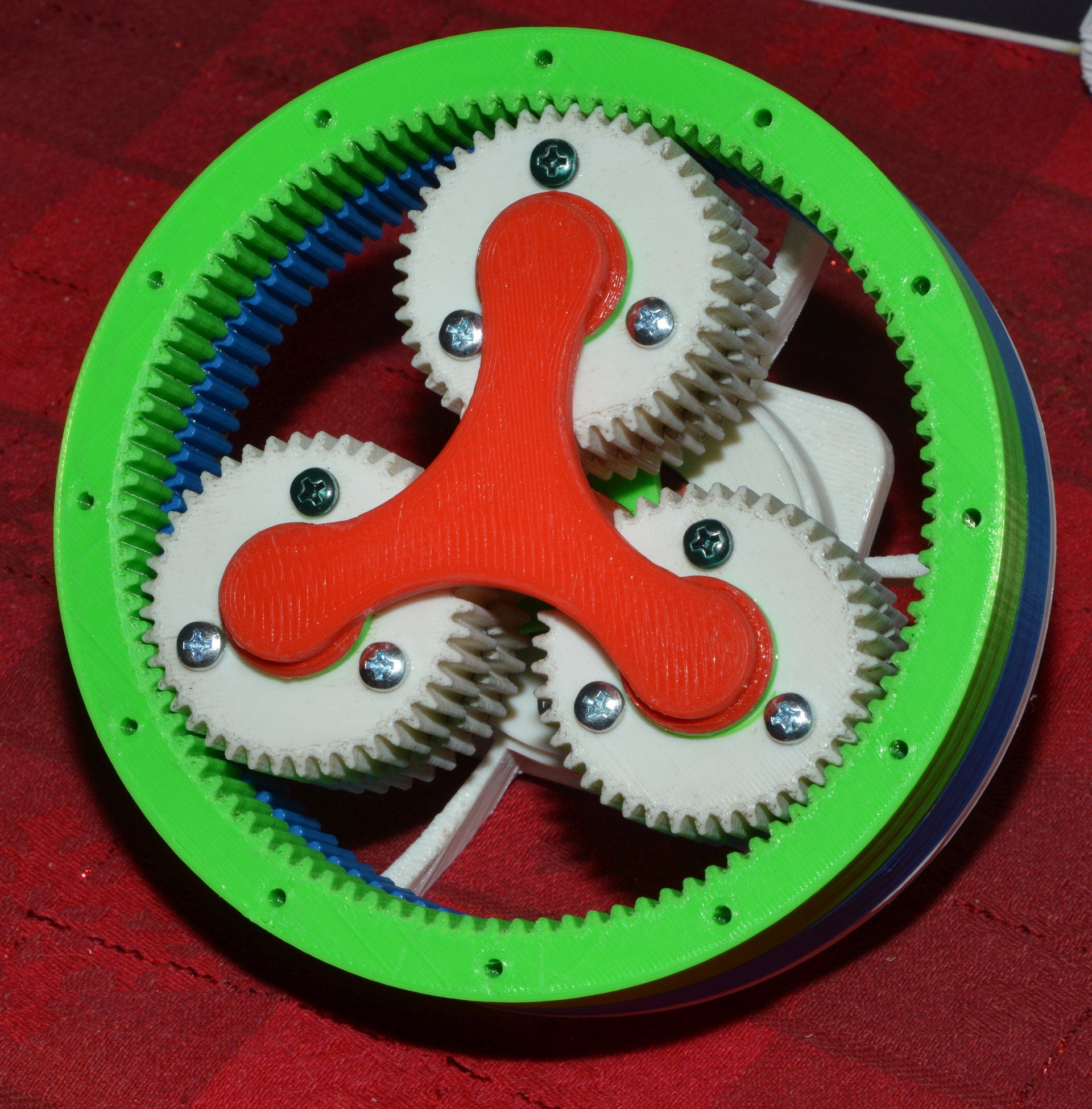
> -----Original Message----- > From: fxkl47BF--- via Emc-users [mailto:[email protected]] > Sent: January-03-22 10:47 AM > To: [email protected] > Cc: [email protected] > Subject: Re: [Emc-users] Harmonic Drive > > On Mon, 3 Jan 2022, John Dammeyer wrote: > > > Just go back on this subject to older postings from Todd where he posted > > the FreeCAD files. I then used those to create step files > and loaded them into AlibreCAD. Since then I've figured out how to make > gears in AlibreCAD which had a Python Script that used > diameter and # of teeth. I modified the script to use module or diameter. > > > > To create the ring gear I first create a normal gear with the right number > > of teeth, module and thickness and save that. Then > create a disk with the desired outside diameter and same thickness. Then use > a Boolean subtract with the gear file. That creates the > ring gear with say 60mm OD and either 100T or 101T. > > > > The spur gears are created separately as a 40T and 41T with the same size > > center hole and three holes to connect the two so that > at one point a pair of teeth line up perfectly. An assembly is made from > those two with constrictions to line them up. > > > > Then an assembly of the entire set is done. As yet I'm not clever enough > > to make the assembly constraints simulate the entire > planet assembly moving around the ring gear. And the reference lines I put > on mine don't actually line up with the correct teeth for > assembly. But I whipped that all up in under an hour. > > > > Todd mentioned in a private email how the ratios work. > > " It is because it isn't behaving quite like a normal compound planetary. > > Because the planets of each set are fixed to each other, > when the planets sets orbited around the fixed ring by the carrier, the > driven ring gear is advanced by (and this is the key) the > difference between the two ratios. The result is when you turn the carrier > one revolution, the planets of the fixed ring gear turn 2.5 > revolutions, therefore the driven ring's planets also turn 2.5 revolutions, > since the ratio of the output set of gears is 2.4634, the ring > is advanced the difference of the two ratios. So the final drive math is > [101/41] / [(100/40)-(101/41)]. Or 2.4634/(2.5-2.4634) = > approx. 67.3. " > > > > It's actually 67.333... If you want to get fussy. > > Here's my 3D printed version of the 150mm diameter gears. > > http://www.autoartisans.com/harmonicdrive/BearingDriveShaft-1.jpg > > http://www.autoartisans.com/harmonicdrive/BearingDriveShaft-2.jpg > http://www.autoartisans.com/harmonicdrive/BearingDriveShaft-3.jpg > > > > The bearing holds the drive centered and when the 3 planets are properly > > aligned requires very little torque to move the non-fixed > ring gear. However I have not yet come up with an inexpensive way to hold > that gear in a way that it would be useful. I've been > playing with a deep groove in the ring gear and a holder outside that along > with 80 of 5.5mm bearings. And a bearing thrust washer > is also needed. > > > > But the above example doesn't have bearings inside the planets either so > > it's plastic on plastic. I can provide the step files if you > wish. > > > > John > > > > > > > > > >> -----Original Message----- > >> From: grumpy via Emc-users [mailto:[email protected]] > >> Sent: January-03-22 4:44 AM > >> To: Enhanced Machine Controller (EMC) > >> Cc: grumpy > >> Subject: Re: [Emc-users] Harmonic Drive > >> > >> January 3, 2022 9:54:10 AM CET John Dammeyer <[email protected]> > >> wrote: > >> For fun I created Todd's version with 0.5module gears. The OD of the > >> assembly > >> is now 60mm compared to 150mm. It would now be possible to choose a far > >> east > >> harmonic drive tapered roller assembly to hold the driven gear in place. > >> Although they are expensive. > >> > >> Not sure what type of bearings, if any would be used for the planetary gear > >> clusters. I suppose one could press in bronze sleeves. I guess it all > >> depends > >> on the duty cycle and target application. If it's a 6 axis robot arm used > >> for > >> tool changing and placement/removal of milled parts then it's not running > >> continuously. Might well for the home or small shop be more than adequate. > >> > >> This example still has 67.3333333:1 reduction but if the fit is well set > >> then > >> the backlash is essentially zero which is different from normal planetary > >> reduction drives. Not sure how important that is for a 6 axis robot arm. > >> > >> In either case, using a 4th axis to create all three spur gears at the same > >> time (one set of 40T and one set of 41 T) and then some sort of > >> broaching/indexing to create the two ring gears the real issue is the outer > >> bearing of the 101T output ring gear. But overall not that difficult to > >> create > >> once you have the 0.5 module shaper style cutter. > >> > >> John > >> > >> Where can I find more info about Todd's planetary drive. > >> It looks very familiar. > > I believe what he has made is a Wolfrom gear. > There are quite a few variations. > I made one a few years back with 45 teeth ring, 15 and 14 teeth planet, and > 15 teeth sun. > It had a 60:1 reduction. > They are very compact. > https://patents.google.com/patent/DE102019203257B3/en > > > > _______________________________________________ > Emc-users mailing list > [email protected] > https://lists.sourceforge.net/lists/listinfo/emc-users _______________________________________________ Emc-users mailing list [email protected] https://lists.sourceforge.net/lists/listinfo/emc-users
{kind=link}
{kind=link}
{kind=link}