Yes. What I want is a completely new suspension like the one I posted before. What I want to know is if I can use ChGenericWheeledSuspension to meet my needs of creating different suspensions. Even if the request is what I said before 在2023年9月21日星期四 UTC+8 16:51:29<Radu Serban> 写道:
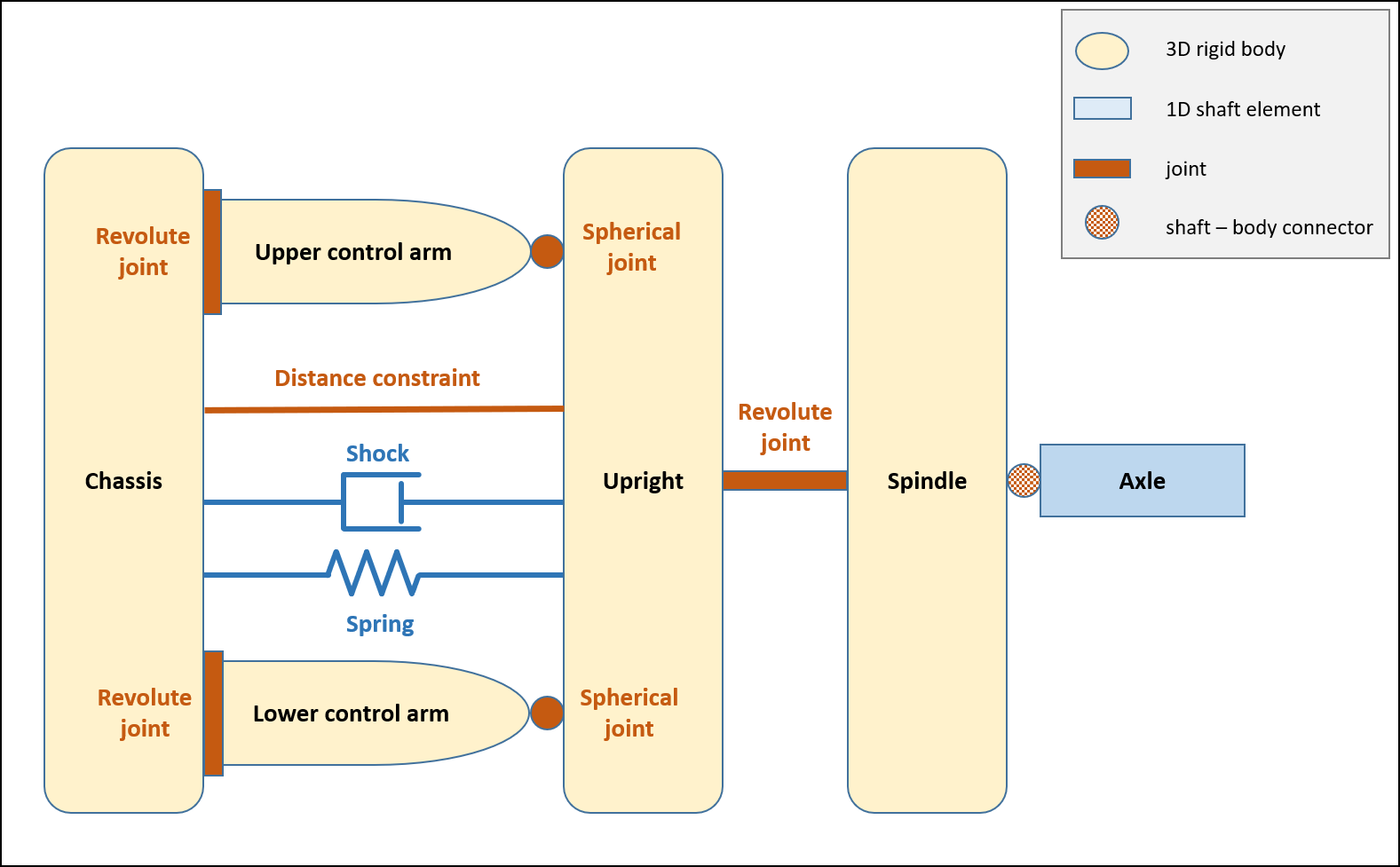
> I’m not sure I understand what you want to do, so maybe the following may > be a complete misinterpretation. Please note that, in the existing > ChDoubleWishbone template, there are *not* 2 separate bodies that make up > the lower control arm! The lower control arm is a single rigid body, > connected through a revolute joint to the chassis and with a spherical > joint to the upright body. The two locations that you highlighted in the > JSON specification file are used only for visualization purposes (the > revolute joint that connects the arm to the chassis is created at the > midpoint between these two locations). As you can see in the JSON file, > both these points are under the “Lower Control Arm” which also specifies > properties for only one body (mass, inertia, COM). > > > > If you are thinking of something else (additional bodies and additional > joints), maybe you can provide a schematic that shows these (similar to this > one > <http://www.projectchrono.org/assets/manual/vehicle/wheeled/DoubleWishbone_topology.png> > > we have for the current template). In any case, if you want to model a > suspension with a topology different from the current one, then yes, use > ChGenericWheeledSuspension as I suggested in my previous email. > > > > --Radu > > > > *From:* '马浩楠' via ProjectChrono <[email protected]> > *Sent:* Thursday, September 21, 2023 10:01 AM > *To:* ProjectChrono <[email protected]> > *Subject:* Re: [chrono] I have a question about "void getLocation" when > using the Chrono vehicle > > > > Thanks for your answer. Sorry for the problem with my expression. My > purpose is to add a hardpoint, and the two links of the lower control arm > become a whole. I'm hoping to create a new suspension to use. You said that > it is feasible to implement a new suspension through > "ChGenericWheeledSuspension", right? > > What I want to do is add a connection point where the two lower control > arm links each become one piece. Add another lower control arm to the > existing lower control arm, and the connection points between the two > independent lower control arms, the chassis and the steering knuckle are > all at one point > > 在2023年9月21日星期四 UTC+8 15:39:02<Radu Serban> 写道: > > Hello, > > > > You did not receive yet an answer because your question was not well > formulated. You are asking about “creating a new suspension in > ChDoubleWishbone”. That does not make sense, given how the Chrono::Vehicle > is designed and what the meaning of a subsystem template is. You may want > to consult the online documentation ( > https://api.projectchrono.org/manual_vehicle.html) and/or the paper ( > https://projectchrono.org/assets/white_papers/chronoVehicle_IJVP.pdf) to > familiarize yourself with the architecture and design of Chrono::Vehicle. > You will then understand that each subsystem template imposes a given > topology of the mechanical system for that particular subsystem. This means > a specific number of bodies, joints, and force elements and a fixed > connectivity between these. The hardpoints that are part of the definition > of a given subsystem (in this case the double wishbone suspension subsystem > implemented in ChDoubleWishbone) are therefore the complete set that is > needed to specify this topology. > > > > Therefore, the question is why you want to add a new hardpoint. I doubt it > is just for monitoring a location on a particular body of that type of > suspension (if that is the case, you can simply get a handle to that body > by its name and then invoke an appropriate Chrono API function to get the > absolute location of some point specified through its local position on > that body). Instead, I suspect you want to use that point to add some > other modeling component to the suspension subsystem. If that is the case, > that will not be a ChDoubleWishbone suspension, but rather a new suspension > template (like the many we already have in Chrono::Vehicle, each one of > them with a different topology). > > > > Creating a new vehicle subsystem template requires adding new files to the > Chrono code base and modifying some others so that the new subsystem type > becomes available for use in vehicle models. That’s obviously not a simple > task and requires a deeper understanding of the code. > > Alternatively, only for wheeled vehicle suspension, I recently added a > “generic” template which allows a user to construct a new suspension > topology by specifying (in a derived class or else through a JSON file) an > arbitrary number of bodies, joints, force elements, etc. as well as their > connectivity. As I said above, I am not absolutely clear on what you are > trying to achieve, but if what you want is your own custom suspension > subsystem, this is the route I suggest for you. > > > > This “generic” template is named ChGenericWheeledSuspension > <https://github.com/projectchrono/chrono/blob/main/src/chrono_vehicle/wheeled_vehicle/suspension/ChGenericWheeledSuspension.h> > > and the derived class that can build one from a JSON specification is > implemented in GenericWheeledSuspension > <https://github.com/projectchrono/chrono/blob/main/src/chrono_vehicle/wheeled_vehicle/suspension/GenericWheeledSuspension.h>. > > There are two JSON samples to illustrate how you can use this mechanism for > constructing your own, custom suspension: > > - HMMWV_DoubleWishboneFront_replica.json > > <https://github.com/projectchrono/chrono/blob/main/data/vehicle/hmmwv/suspension/HMMWV_DoubleWishboneFront_replica.json> > > – which replicates the double wishbone suspension on the front of a HMMWV. > - UAZBUS_FrontSAELeafspringAxle_replica.json > > <https://github.com/projectchrono/chrono/blob/main/data/vehicle/uaz/suspension/UAZBUS_FrontSAELeafspringAxle_replica.json> > > – which replicates the same topology as the SAELeafspringAxle suspension > on > the front of a UAZ vehicle. > > These two samples are for illustration only, as they simply replicate > already existing suspension templates. But you could now modify any of > them, e.g., by adding new bodies, or additional springs, etc, and get a > completely new suspension topology. Since you seem interested in a > slightly modified double wishbone suspension, you should probably start > from the 1st one I listed above. > > > > You can read more about this new mechanism for creating a generic > suspension topology in the Chrono ChangeLog > <https://github.com/projectchrono/chrono/blob/main/CHANGELOG.md#added-new-generic-template-for-wheeled-suspension-subsystems> > > file. > > > > Best, > Radu > > > > *From:* '马浩楠' via ProjectChrono <[email protected]> > *Sent:* Wednesday, September 20, 2023 9:05 AM > *To:* ProjectChrono <[email protected]> > *Subject:* [chrono] I have a question about "void getLocation" when using > the Chrono vehicle > > > > I want to add a "UCA_UF" to the enum PointId in ChDoubleWishbone.h, which > means "Location Upright Front". > > What I want to know is that in "Initialize", I need to calculate the > position of "UCA_UF". Is it possible to do this using getLocation, or do we > need to calculate it manually? > > -- > You received this message because you are subscribed to the Google Groups > "ProjectChrono" group. > To unsubscribe from this group and stop receiving emails from it, send an > email to [email protected]. > To view this discussion on the web visit > https://groups.google.com/d/msgid/projectchrono/b3fb67bc-5492-4331-aee1-0e94e675d419n%40googlegroups.com > > <https://groups.google.com/d/msgid/projectchrono/b3fb67bc-5492-4331-aee1-0e94e675d419n%40googlegroups.com?utm_medium=email&utm_source=footer> > . > > -- > You received this message because you are subscribed to the Google Groups > "ProjectChrono" group. > To unsubscribe from this group and stop receiving emails from it, send an > email to [email protected]. > > To view this discussion on the web visit > https://groups.google.com/d/msgid/projectchrono/a23e20bb-6a5d-4afc-aabd-989032774bfan%40googlegroups.com > > <https://groups.google.com/d/msgid/projectchrono/a23e20bb-6a5d-4afc-aabd-989032774bfan%40googlegroups.com?utm_medium=email&utm_source=footer> > . > -- You received this message because you are subscribed to the Google Groups "ProjectChrono" group. To unsubscribe from this group and stop receiving emails from it, send an email to [email protected]. To view this discussion on the web visit https://groups.google.com/d/msgid/projectchrono/504bfc17-82c5-4032-9015-f4ac3c1c00a3n%40googlegroups.com.
{kind=link}