Hi Tom and Warren, > With a Z3801A or TBolt (or any cheap single channel GPS) receiver > you should expect maybe a 5 to 10 to 15 ns variation over a 12 or 24 > hour period. You should be able to see this with a 5065A or a good > Cs reference.
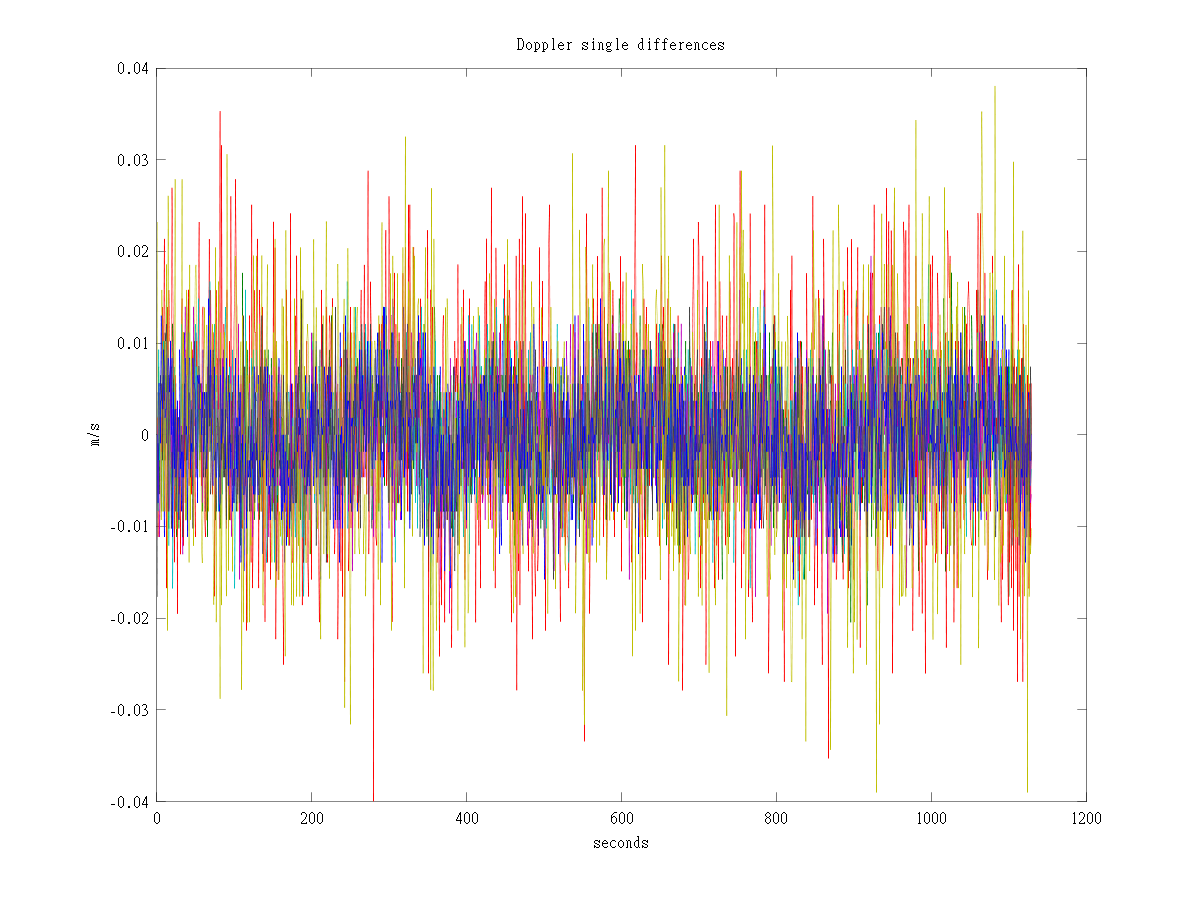
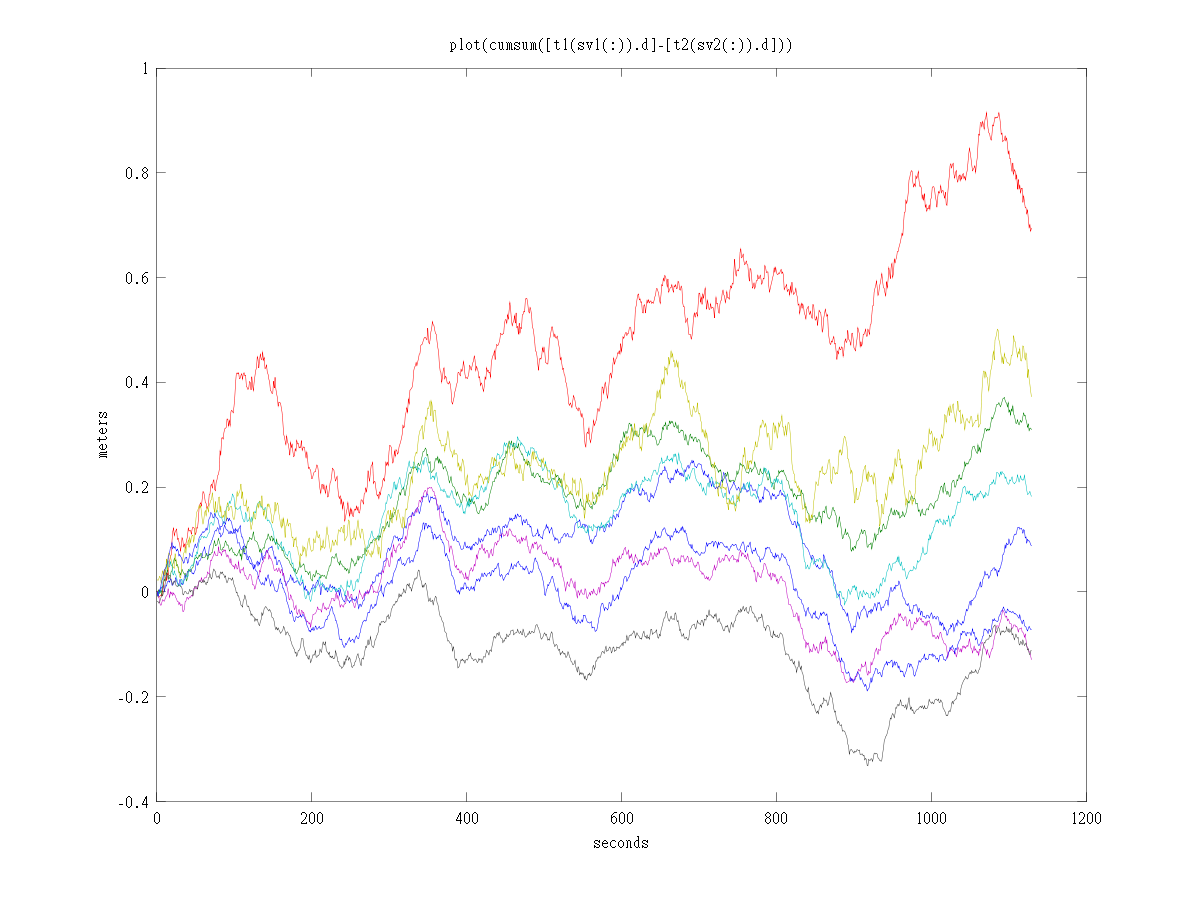
Hope to get a working 5065A in a month or two... ;-) >> The Z3801's GPS engine is far inferior and not even close to the 10 to >> 100 >> ps, 1 sec noise that a Tbolt engine has. > > Careful, each does averaging. So to compare you have to include > the time constant into the equation. The RS232 numbers the TBolt > reports are heavily averaged so at 1 second they always look a lot > better than they actually are. If you have hard data for your claim, > I'd be interested in seeing it. Where comes the averaging on the Tbolt messages? Looking at these (old) plots of two Tbolts running on the same antenna a few years ago. (I have not searched for the orginal datalogs.) http://www.lysator.liu.se/~bg/timenuts/sd_doppler.png http://www.lysator.liu.se/~bg/timenuts/csum_sd_doppler.png Eying the single difference plot, having around 1cm/s rms noise, that translates to 1/30 ns/s or 33ps 1 second noise. Does that look ok with you? Warren: "A really good Tbolt set up will hold around 2 ns of phase noise." Where are you getting phase measurements out of the Tbolt? Are you converting doppler measurements to phase? Or is your phase refereing to something else? kind regards, Björn _______________________________________________ time-nuts mailing list -- [email protected] To unsubscribe, go to https://www.febo.com/cgi-bin/mailman/listinfo/time-nuts and follow the instructions there.
{kind=link}
{kind=link}