here is a show...
5 float OUT 0 axis.0.motor-pos-cmd ==> Xpos-cmd
5 float IN 0 axis.0.motor-pos-fb <== Xpos-fb
5 bit OUT FALSE axis.0.neg-hard-limit
5 bit IN FALSE axis.0.neg-lim-sw-in
5 bit OUT FALSE axis.0.pos-hard-limit
5 bit IN FALSE axis.0.pos-lim-sw-in
5 bit OUT FALSE axis.0.wheel-jog-active
5 bit OUT TRUE axis.1.active
5 bit OUT FALSE axis.1.amp-enable-out ==> Yen
5 bit IN FALSE axis.1.amp-fault-in
5 float OUT 0 axis.1.backlash-corr
5 float OUT 0 axis.1.backlash-filt
5 float OUT 0 axis.1.backlash-vel
5 float OUT 0 axis.1.coarse-pos-cmd
5 bit OUT FALSE axis.1.error
5 float OUT 0 axis.1.f-error
5 float OUT 0.01 axis.1.f-error-lim
5 bit OUT FALSE axis.1.f-errored
5 bit OUT FALSE axis.1.faulted
5 float OUT 0 axis.1.free-pos-cmd
5 bit OUT FALSE axis.1.free-tp-enable
5 float OUT 0 axis.1.free-vel-lim
5 bit IN FALSE axis.1.home-sw-in
5 bit OUT FALSE axis.1.homed
5 bit OUT FALSE axis.1.homing
5 bit OUT TRUE axis.1.in-position
5 bit I/O FALSE axis.1.index-enable
5 s32 IN 0 axis.1.jog-counts
5 bit IN FALSE axis.1.jog-enable
5 float IN 0 axis.1.jog-scale
5 bit IN FALSE axis.1.jog-vel-mode
5 float OUT 0 axis.1.joint-pos-cmd
5 float OUT 0 axis.1.joint-pos-fb
5 float OUT 0 axis.1.joint-vel-cmd
5 bit OUT FALSE axis.1.kb-jog-active
5 float OUT 0 axis.1.motor-pos-cmd ==> Ypos-cmd
5 float IN 0 axis.1.motor-pos-fb <== Ypos-fb
5 bit OUT FALSE axis.1.neg-hard-limit
5 bit IN FALSE axis.1.neg-lim-sw-in
5 bit OUT FALSE axis.1.pos-hard-limit
5 bit IN FALSE axis.1.pos-lim-sw-in
5 bit OUT FALSE axis.1.wheel-jog-active
5 bit OUT TRUE axis.2.active
5 bit OUT FALSE axis.2.amp-enable-out ==> Zen
5 bit IN FALSE axis.2.amp-fault-in
5 float OUT 0 axis.2.backlash-corr
5 float OUT 0 axis.2.backlash-filt
5 float OUT 0 axis.2.backlash-vel
5 float OUT 0 axis.2.coarse-pos-cmd
5 bit OUT FALSE axis.2.error
5 float OUT 0 axis.2.f-error
5 float OUT 0.01 axis.2.f-error-lim
5 bit OUT FALSE axis.2.f-errored
5 bit OUT FALSE axis.2.faulted
5 float OUT 0 axis.2.free-pos-cmd
5 bit OUT FALSE axis.2.free-tp-enable
5 float OUT 0 axis.2.free-vel-lim
5 bit IN FALSE axis.2.home-sw-in
5 bit OUT FALSE axis.2.homed
5 bit OUT FALSE axis.2.homing
5 bit OUT TRUE axis.2.in-position
5 bit I/O FALSE axis.2.index-enable
5 s32 IN 0 axis.2.jog-counts
5 bit IN FALSE axis.2.jog-enable
5 float IN 0 axis.2.jog-scale
5 bit IN FALSE axis.2.jog-vel-mode
5 float OUT 0 axis.2.joint-pos-cmd
5 float OUT 0 axis.2.joint-pos-fb
5 float OUT 0 axis.2.joint-vel-cmd
5 bit OUT FALSE axis.2.kb-jog-active
5 float OUT 0 axis.2.motor-pos-cmd ==> Zpos-cmd
5 float IN 0 axis.2.motor-pos-fb <== Zpos-fb
5 bit OUT FALSE axis.2.neg-hard-limit
5 bit IN FALSE axis.2.neg-lim-sw-in
5 bit OUT FALSE axis.2.pos-hard-limit
5 bit IN FALSE axis.2.pos-lim-sw-in
5 bit OUT FALSE axis.2.wheel-jog-active
9 bit OUT FALSE axisui.jog.a
9 bit OUT FALSE axisui.jog.b
9 bit OUT FALSE axisui.jog.c
9 float OUT 0 axisui.jog.increment
9 bit OUT FALSE axisui.jog.u
9 bit OUT FALSE axisui.jog.v
9 bit OUT FALSE axisui.jog.w
9 bit OUT TRUE axisui.jog.x
9 bit OUT FALSE axisui.jog.y
9 bit OUT FALSE axisui.jog.z
9 bit IN FALSE axisui.notifications-clear
9 bit IN FALSE axisui.notifications-clear-error
9 bit IN FALSE axisui.notifications-clear-info
9 bit IN FALSE axisui.set-manual-mode
7 float IN 0 classicladder.0.floatin-00
7 float IN 0 classicladder.0.floatin-01
7 float IN 0 classicladder.0.floatin-02
7 float IN 0 classicladder.0.floatin-03
7 float IN 0 classicladder.0.floatin-04
7 float IN 0 classicladder.0.floatin-05
7 float IN 0 classicladder.0.floatin-06
7 float IN 0 classicladder.0.floatin-07
7 float IN 0 classicladder.0.floatin-08
7 float IN 0 classicladder.0.floatin-09
7 float OUT 0 classicladder.0.floatout-00
7 float OUT 0 classicladder.0.floatout-01
7 float OUT 0 classicladder.0.floatout-02
7 float OUT 0 classicladder.0.floatout-03
7 float OUT 0 classicladder.0.floatout-04
7 float OUT 0 classicladder.0.floatout-05
7 float OUT 0 classicladder.0.floatout-06
7 float OUT 0 classicladder.0.floatout-07
7 float OUT 0 classicladder.0.floatout-08
7 float OUT 0 classicladder.0.floatout-09
7 bit IN FALSE classicladder.0.in-00
7 bit IN FALSE classicladder.0.in-01
7 bit IN FALSE classicladder.0.in-02
7 bit IN FALSE classicladder.0.in-03
7 bit IN FALSE classicladder.0.in-04
7 bit IN FALSE classicladder.0.in-05
7 bit IN FALSE classicladder.0.in-06
7 bit IN FALSE classicladder.0.in-07
7 bit IN FALSE classicladder.0.in-08
7 bit IN FALSE classicladder.0.in-09
7 bit IN FALSE classicladder.0.in-10
7 bit IN FALSE classicladder.0.in-11
7 bit IN FALSE classicladder.0.in-12
7 bit IN FALSE classicladder.0.in-13
7 bit IN FALSE classicladder.0.in-14
7 bit IN FALSE classicladder.0.in-15
7 bit IN FALSE classicladder.0.in-16
7 bit IN FALSE classicladder.0.in-17
7 bit IN FALSE classicladder.0.in-18
7 bit IN FALSE classicladder.0.in-19
7 bit IN FALSE classicladder.0.in-20
7 bit IN FALSE classicladder.0.in-21
7 bit IN FALSE classicladder.0.in-22
7 bit IN FALSE classicladder.0.in-23
7 bit IN FALSE classicladder.0.in-24
7 bit IN FALSE classicladder.0.in-25
7 bit IN FALSE classicladder.0.in-26
7 bit IN FALSE classicladder.0.in-27
7 bit IN FALSE classicladder.0.in-28
7 bit IN FALSE classicladder.0.in-29
7 bit IN FALSE classicladder.0.in-30
7 bit IN FALSE classicladder.0.in-31
7 bit IN FALSE classicladder.0.in-32
7 bit IN FALSE classicladder.0.in-33
7 bit IN FALSE classicladder.0.in-34
7 bit IN FALSE classicladder.0.in-35
7 bit IN FALSE classicladder.0.in-36
7 bit IN FALSE classicladder.0.in-37
7 bit IN FALSE classicladder.0.in-38
7 bit IN FALSE classicladder.0.in-39
7 bit IN FALSE classicladder.0.in-40
7 bit IN FALSE classicladder.0.in-41
7 bit IN FALSE classicladder.0.in-42
7 bit IN FALSE classicladder.0.in-43
7 bit IN FALSE classicladder.0.in-44
7 bit IN FALSE classicladder.0.in-45
7 bit IN FALSE classicladder.0.in-46
7 bit IN FALSE classicladder.0.in-47
7 bit IN FALSE classicladder.0.in-48
7 bit IN FALSE classicladder.0.in-49
7 bit OUT FALSE classicladder.0.out-00
7 bit OUT FALSE classicladder.0.out-01
7 bit OUT FALSE classicladder.0.out-02
7 bit OUT FALSE classicladder.0.out-03
7 bit OUT FALSE classicladder.0.out-04
7 bit OUT FALSE classicladder.0.out-05
7 bit OUT FALSE classicladder.0.out-06
7 bit OUT FALSE classicladder.0.out-07
7 bit OUT FALSE classicladder.0.out-08
7 bit OUT FALSE classicladder.0.out-09
7 bit OUT FALSE classicladder.0.out-10
7 bit OUT FALSE classicladder.0.out-11
7 bit OUT FALSE classicladder.0.out-12
7 bit OUT FALSE classicladder.0.out-13
7 bit OUT FALSE classicladder.0.out-14
7 bit OUT FALSE classicladder.0.out-15
7 bit OUT FALSE classicladder.0.out-16
7 bit OUT FALSE classicladder.0.out-17
7 bit OUT FALSE classicladder.0.out-18
7 bit OUT FALSE classicladder.0.out-19
7 bit OUT FALSE classicladder.0.out-20
7 bit OUT FALSE classicladder.0.out-21
7 bit OUT FALSE classicladder.0.out-22
7 bit OUT FALSE classicladder.0.out-23
7 bit OUT FALSE classicladder.0.out-24
7 bit OUT FALSE classicladder.0.out-25
7 bit OUT FALSE classicladder.0.out-26
7 bit OUT FALSE classicladder.0.out-27
7 bit OUT FALSE classicladder.0.out-28
7 bit OUT FALSE classicladder.0.out-29
7 s32 IN 0 classicladder.0.s32in-00
7 s32 IN 0 classicladder.0.s32in-01
7 s32 IN 0 classicladder.0.s32in-02
7 s32 IN 0 classicladder.0.s32in-03
7 s32 IN 0 classicladder.0.s32in-04
7 s32 IN 0 classicladder.0.s32in-05
7 s32 IN 0 classicladder.0.s32in-06
7 s32 IN 0 classicladder.0.s32in-07
7 s32 IN 0 classicladder.0.s32in-08
7 s32 IN 0 classicladder.0.s32in-09
7 s32 OUT 0 classicladder.0.s32out-00
7 s32 OUT 0 classicladder.0.s32out-01
7 s32 OUT 0 classicladder.0.s32out-02
7 s32 OUT 0 classicladder.0.s32out-03
7 s32 OUT 0 classicladder.0.s32out-04
7 s32 OUT 0 classicladder.0.s32out-05
7 s32 OUT 0 classicladder.0.s32out-06
7 s32 OUT 0 classicladder.0.s32out-07
7 s32 OUT 0 classicladder.0.s32out-08
7 s32 OUT 0 classicladder.0.s32out-09
3 bit OUT FALSE iocontrol.0.coolant-flood
3 bit OUT FALSE iocontrol.0.coolant-mist
3 bit IN FALSE iocontrol.0.emc-enable-in <== estop-loop
3 bit OUT FALSE iocontrol.0.lube
3 bit IN FALSE iocontrol.0.lube_level
3 bit OUT FALSE iocontrol.0.tool-change ==> tool-change-loop
3 bit IN FALSE iocontrol.0.tool-changed <== tool-change-loop
3 s32 OUT 0 iocontrol.0.tool-number
3 s32 OUT 0 iocontrol.0.tool-prep-number
3 s32 OUT 0 iocontrol.0.tool-prep-pocket
3 bit OUT FALSE iocontrol.0.tool-prepare ==> tool-prep-loop
3 bit IN FALSE iocontrol.0.tool-prepared <== tool-prep-loop
3 bit OUT FALSE iocontrol.0.user-enable-out ==> estop-loop
3 bit OUT FALSE iocontrol.0.user-request-enable
5 float IN 1 motion.adaptive-feed
5 float IN 0 motion.analog-in-00
5 float IN 0 motion.analog-in-01
5 float IN 0 motion.analog-in-02
5 float IN 0 motion.analog-in-03
5 float OUT 0 motion.analog-out-00
5 float OUT 0 motion.analog-out-01
5 float OUT 0 motion.analog-out-02
5 float OUT 0 motion.analog-out-03
5 bit OUT FALSE motion.coord-error
5 bit OUT TRUE motion.coord-mode
5 float OUT 0 motion.current-vel
5 bit IN FALSE motion.digital-in-00
5 bit IN FALSE motion.digital-in-01
5 bit IN FALSE motion.digital-in-02
5 bit IN FALSE motion.digital-in-03
5 bit OUT FALSE motion.digital-out-00
5 bit OUT FALSE motion.digital-out-01
5 bit OUT FALSE motion.digital-out-02
5 bit OUT FALSE motion.digital-out-03
5 float OUT 0 motion.distance-to-go
5 bit IN TRUE motion.enable
5 bit IN FALSE motion.feed-hold
5 bit OUT TRUE motion.in-position
5 bit IN FALSE motion.motion-enabled
5 bit OUT FALSE motion.on-soft-limit
5 bit IN FALSE motion.probe-input
5 s32 OUT 0 motion.program-line
5 float OUT 0 motion.requested-vel
5 bit IN TRUE motion.spindle-at-speed
5 bit OUT TRUE motion.spindle-brake
5 bit OUT FALSE motion.spindle-forward
5 bit I/O FALSE motion.spindle-index-enable
5 bit OUT FALSE motion.spindle-on ==> spindle-on
5 bit OUT FALSE motion.spindle-reverse
5 float IN 0 motion.spindle-revs
5 float IN 0 motion.spindle-speed-in
5 float OUT 0 motion.spindle-speed-out
5 float OUT 0 motion.spindle-speed-out-rps
5 bit OUT FALSE motion.teleop-mode
5 float OUT 0 motion.tooloffset.a
5 float OUT 0 motion.tooloffset.b
5 float OUT 0 motion.tooloffset.c
5 float OUT 0 motion.tooloffset.u
5 float OUT 0 motion.tooloffset.v
5 float OUT 0 motion.tooloffset.w
5 float OUT 0 motion.tooloffset.x
5 float OUT 0 motion.tooloffset.y
5 float OUT 0 motion.tooloffset.z
8 bit IN FALSE parport.0.pin-01-out
8 bit IN FALSE parport.0.pin-02-out <== Xdir
8 bit IN FALSE parport.0.pin-03-out <== Xstep
8 bit IN FALSE parport.0.pin-04-out <== Ydir
8 bit IN FALSE parport.0.pin-05-out <== Ystep
8 bit IN FALSE parport.0.pin-06-out <== Zdir
8 bit IN FALSE parport.0.pin-07-out <== Zstep
8 bit IN FALSE parport.0.pin-08-out
8 bit IN FALSE parport.0.pin-09-out <== spindle-on
8 bit OUT FALSE parport.0.pin-10-in
8 bit OUT FALSE parport.0.pin-10-in-not
8 bit OUT FALSE parport.0.pin-11-in
8 bit OUT FALSE parport.0.pin-11-in-not
8 bit OUT FALSE parport.0.pin-12-in
8 bit OUT FALSE parport.0.pin-12-in-not
8 bit OUT FALSE parport.0.pin-13-in
8 bit OUT FALSE parport.0.pin-13-in-not
8 bit IN FALSE parport.0.pin-14-out
8 bit OUT FALSE parport.0.pin-15-in
8 bit OUT FALSE parport.0.pin-15-in-not
8 bit IN FALSE parport.0.pin-16-out
8 bit IN FALSE parport.0.pin-17-out
6 s32 OUT 0 stepgen.0.counts
6 bit OUT FALSE stepgen.0.dir ==> Xdir
6 bit IN FALSE stepgen.0.enable <== Xen
6 float IN 0 stepgen.0.position-cmd <== Xpos-cmd
6 float OUT 0 stepgen.0.position-fb ==> Xpos-fb
6 bit OUT FALSE stepgen.0.step ==> Xstep
6 s32 OUT 0 stepgen.1.counts
6 bit OUT FALSE stepgen.1.dir ==> Ydir
6 bit IN FALSE stepgen.1.enable <== Yen
6 float IN 0 stepgen.1.position-cmd <== Ypos-cmd
6 float OUT 0 stepgen.1.position-fb ==> Ypos-fb
6 bit OUT FALSE stepgen.1.step ==> Ystep
6 s32 OUT 0 stepgen.2.counts
6 bit OUT FALSE stepgen.2.dir ==> Zdir
6 bit IN FALSE stepgen.2.enable <== Zen
6 float IN 0 stepgen.2.position-cmd <== Zpos-cmd
6 float OUT 0 stepgen.2.position-fb ==> Zpos-fb
6 bit OUT FALSE stepgen.2.step ==> Zstep
Pin Aliases:
Alias Original Name
Signals:
Type Value Name (linked to)
bit FALSE Xdir
==> parport.0.pin-02-out
<== stepgen.0.dir
bit FALSE Xen
<== axis.0.amp-enable-out
==> stepgen.0.enable
float 0 Xpos-cmd
<== axis.0.motor-pos-cmd
==> stepgen.0.position-cmd
float 0 Xpos-fb
==> axis.0.motor-pos-fb
<== stepgen.0.position-fb
bit FALSE Xstep
==> parport.0.pin-03-out
<== stepgen.0.step
bit FALSE Ydir
==> parport.0.pin-04-out
<== stepgen.1.dir
bit FALSE Yen
<== axis.1.amp-enable-out
==> stepgen.1.enable
float 0 Ypos-cmd
<== axis.1.motor-pos-cmd
==> stepgen.1.position-cmd
float 0 Ypos-fb
==> axis.1.motor-pos-fb
<== stepgen.1.position-fb
bit FALSE Ystep
==> parport.0.pin-05-out
<== stepgen.1.step
bit FALSE Zdir
==> parport.0.pin-06-out
<== stepgen.2.dir
bit FALSE Zen
<== axis.2.amp-enable-out
==> stepgen.2.enable
float 0 Zpos-cmd
<== axis.2.motor-pos-cmd
==> stepgen.2.position-cmd
float 0 Zpos-fb
==> axis.2.motor-pos-fb
<== stepgen.2.position-fb
bit FALSE Zstep
==> parport.0.pin-07-out
<== stepgen.2.step
bit FALSE estop-loop
==> iocontrol.0.emc-enable-in
<== iocontrol.0.user-enable-out
bit FALSE spindle-on
<== motion.spindle-on
==> parport.0.pin-09-out
bit FALSE tool-change-loop
<== iocontrol.0.tool-change
==> iocontrol.0.tool-changed
bit FALSE tool-prep-loop
<== iocontrol.0.tool-prepare
==> iocontrol.0.tool-prepared
Parameters:
Owner Type Dir Value Name
5 s32 RO 0 axis.0.home-state
5 s32 RO 0 axis.1.home-state
5 s32 RO 0 axis.2.home-state
7 s32 RO 190548 classicladder.0.refresh.time
7 s32 RW 235188 classicladder.0.refresh.tmax
7 s32 RO 2 classicladder.ladder-state
5 s32 RO 336 motion-command-handler.time
5 s32 RW 7428 motion-command-handler.tmax
5 s32 RO 7212 motion-controller.time
5 s32 RW 64176 motion-controller.tmax
5 bit RO FALSE motion.debug-bit-0
5 bit RO FALSE motion.debug-bit-1
5 float RO 1 motion.debug-float-0
5 float RO 0 motion.debug-float-1
5 float RO 0 motion.debug-float-2
5 float RO 1 motion.debug-float-3
5 s32 RO 0 motion.debug-s32-0
5 s32 RO 0 motion.debug-s32-1
5 u32 RO 0x00185B5C motion.servo.last-period
5 float RO 1000180 motion.servo.last-period-ns
5 u32 RW 0x00000010 motion.servo.overruns
8 u32 RW 0x00000000 parport.0.debug1
8 u32 RW 0x00000000 parport.0.debug2
8 bit RW FALSE parport.0.pin-01-out-invert
8 bit RW FALSE parport.0.pin-01-out-reset
8 bit RW FALSE parport.0.pin-02-out-invert
8 bit RW FALSE parport.0.pin-02-out-reset
8 bit RW FALSE parport.0.pin-03-out-invert
8 bit RW FALSE parport.0.pin-03-out-reset
8 bit RW FALSE parport.0.pin-04-out-invert
8 bit RW FALSE parport.0.pin-04-out-reset
8 bit RW FALSE parport.0.pin-05-out-invert
8 bit RW FALSE parport.0.pin-05-out-reset
8 bit RW FALSE parport.0.pin-06-out-invert
8 bit RW FALSE parport.0.pin-06-out-reset
8 bit RW FALSE parport.0.pin-07-out-invert
8 bit RW FALSE parport.0.pin-07-out-reset
8 bit RW FALSE parport.0.pin-08-out-invert
8 bit RW FALSE parport.0.pin-08-out-reset
8 bit RW FALSE parport.0.pin-09-out-invert
8 bit RW FALSE parport.0.pin-09-out-reset
8 bit RW FALSE parport.0.pin-14-out-invert
8 bit RW FALSE parport.0.pin-14-out-reset
8 bit RW FALSE parport.0.pin-16-out-invert
8 bit RW FALSE parport.0.pin-16-out-reset
8 bit RW FALSE parport.0.pin-17-out-invert
8 bit RW FALSE parport.0.pin-17-out-reset
8 s32 RO 0 parport.0.read.time
8 s32 RW 0 parport.0.read.tmax
8 u32 RW 0x00000000 parport.0.reset-time
8 s32 RO 0 parport.0.reset.time
8 s32 RW 0 parport.0.reset.tmax
8 s32 RO 0 parport.0.write.time
8 s32 RW 0 parport.0.write.tmax
8 s32 RO 0 parport.read-all.time
8 s32 RW 0 parport.read-all.tmax
8 s32 RO 0 parport.write-all.time
8 s32 RW 0 parport.write-all.tmax
6 u32 RW 0x00000001 stepgen.0.dirhold
6 u32 RW 0x00000001 stepgen.0.dirsetup
6 float RO 0 stepgen.0.frequency
6 float RW 21 stepgen.0.maxaccel
6 float RW 0 stepgen.0.maxvel
6 float RW 4000 stepgen.0.position-scale
6 s32 RO 0 stepgen.0.rawcounts
6 u32 RW 0x00000001 stepgen.0.steplen
6 u32 RW 0x00000001 stepgen.0.stepspace
6 u32 RW 0x00000001 stepgen.1.dirhold
6 u32 RW 0x00000001 stepgen.1.dirsetup
6 float RO 0 stepgen.1.frequency
6 float RW 21 stepgen.1.maxaccel
6 float RW 0 stepgen.1.maxvel
6 float RW 4000 stepgen.1.position-scale
6 s32 RO 0 stepgen.1.rawcounts
6 u32 RW 0x00000001 stepgen.1.steplen
6 u32 RW 0x00000001 stepgen.1.stepspace
6 u32 RW 0x00000001 stepgen.2.dirhold
6 u32 RW 0x00000001 stepgen.2.dirsetup
6 float RO 0 stepgen.2.frequency
6 float RW 21 stepgen.2.maxaccel
6 float RW 0 stepgen.2.maxvel
6 float RW 4000 stepgen.2.position-scale
6 s32 RO 0 stepgen.2.rawcounts
6 u32 RW 0x00000001 stepgen.2.steplen
6 u32 RW 0x00000001 stepgen.2.stepspace
6 s32 RO 0 stepgen.capture-position.time
6 s32 RW 0 stepgen.capture-position.tmax
6 s32 RO 0 stepgen.make-pulses.time
6 s32 RW 0 stepgen.make-pulses.tmax
6 s32 RO 0 stepgen.update-freq.time
6 s32 RW 0 stepgen.update-freq.tmax
5 float RO 0 tc.0.acc
5 float RO 0 tc.0.pos
5 float RO 0 tc.0.vel
5 float RO 0 tc.1.acc
5 float RO 0 tc.1.pos
5 float RO 0 tc.1.vel
5 float RO 0 tc.2.acc
5 float RO 0 tc.2.pos
5 float RO 0 tc.2.vel
5 float RO 0 tc.3.acc
5 float RO 0 tc.3.pos
5 float RO 0 tc.3.vel
5 u32 RO 0x00000000 traj.active_tc
5 float RO 0 traj.pos_out
5 float RO 0 traj.vel_out
Parameter Aliases:
Alias Original Name
Exported Functions:
Owner CodeAddr Arg FP Users Name
00007 f9b015c9 00000000 YES 1 classicladder.0.refresh
00005 f994b8d0 00000000 YES 1 motion-command-handler
00005 f994dd9e 00000000 YES 1 motion-controller
00008 f9b26000 f98e3f28 NO 0 parport.0.read
00008 f9b26219 f98e3f28 NO 0 parport.0.reset
00008 f9b262fa f98e3f28 NO 0 parport.0.write
00008 f9b260ac f98e3f28 NO 0 parport.read-all
00008 f9b26488 f98e3f28 NO 0 parport.write-all
00006 f85f520f f98e39f8 YES 0 stepgen.capture-position
00006 f85f5000 f98e39f8 NO 0 stepgen.make-pulses
00006 f85f5307 f98e39f8 YES 0 stepgen.update-freq
Realtime Threads:
Period FP Name ( Time, Max-Time )
999823 YES servo-thread ( 195168, 299304 )
1 classicladder.0.refresh
2 motion-command-handler
3 motion-controller
halcmd:
On Fri, 03 Feb 2012 13:05:02 -0600
sam sokolik <[email protected]> wrote:
> All this talk of lowering the servo thread had me thinking back to when
> I was setting up the K&T. I wanted to try to lower the servo thread for
> testing. I could not go much slower the the 1ms default or I would get
> real time delays. After some consultation on irc - it was decided that
> the ladder was the issue. I gave up and left my servo thread at 1ms.
>
> My ladder does tool chain logic, tool changing, pallet transfer and a
> few other odds and ends. It has probably over 16 sections and quite a
> few rungs. when the section display is open - the upper right hand
> corner has the scan time - it is 135us. vs the classic ladder sample
> in the sample configs (pretty much just estop logic and oiling) which
> runs in 17us.
>
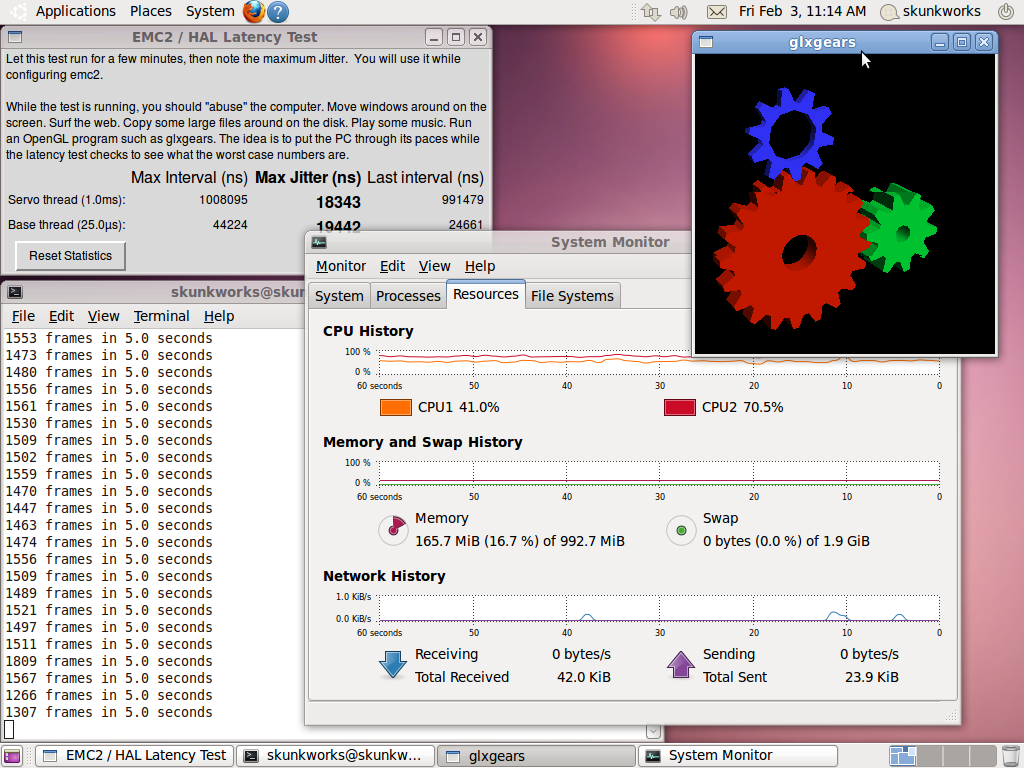
> I have a older atom330 board here that I am playing with. On a side
> note - here is the latency test without isolcups=1
> http://www.electronicsam.com/images/KandT/testing/atomnonisolcups.png
>
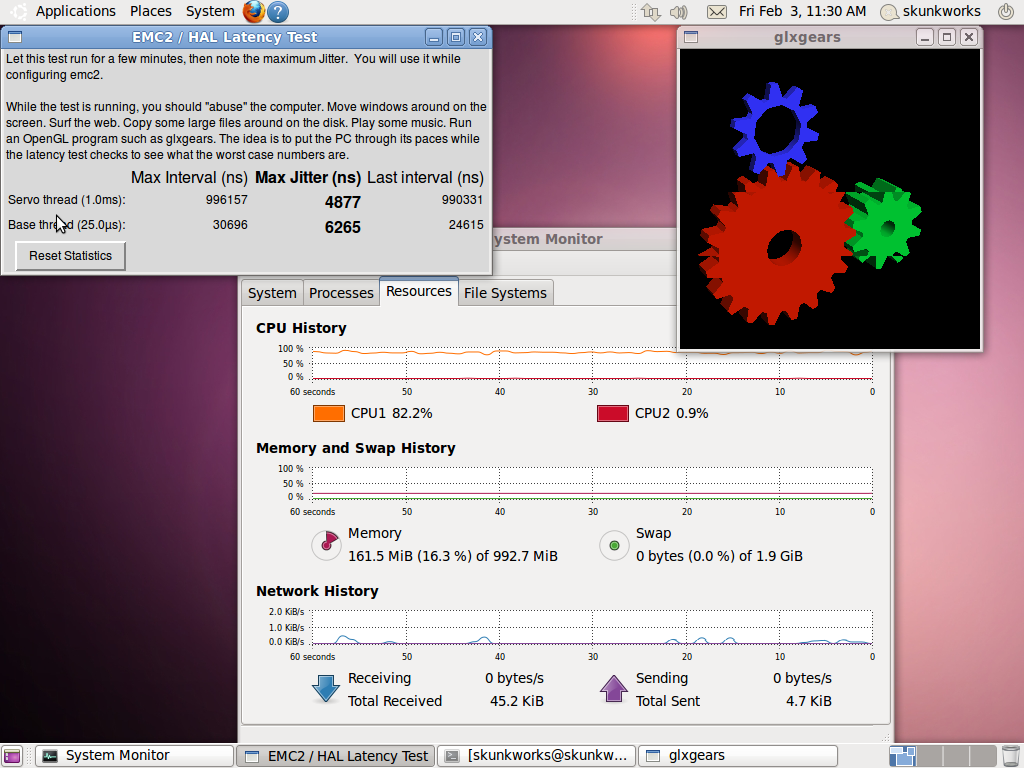
> with isolcups=1
> http://www.electronicsam.com/images/KandT/testing/atomisolcpus.png
>
> I put the classic ladder parts into the emc stepper_inch config from the
> sample configs (emc version 2.4.6) fresh install from the livecd then
> updated. I removed the base thread and stepgen functions from the threads.
>
> here is the config.
> http://www.electronicsam.com/images/KandT/testing/stepper/
> that has my ladder in it (just running - none of the pins are
> connected) This is ladder from sometime in the distant past - I am sure
> it isn't the latest ladder.
>
> Now - on this atom - it will not run at 1ms. It seems to run at
> .909khz. (servo period 1100000) The K&T is using a asus motherboard
> and amd processor. (don't remember exactly but it is quite a bit more
> powerful than the atom) The atom board will run the sample ladder logic
> down to about 5khz.
>
> So - the ladder isn't that intense - does classic ladder just take that
> much time? Is there another issue? am I making any sense? :) It seems
> to me if I made a much larger ladder - it might stop running on the K&T
> computer...
>
> sam
>
>
>
> ------------------------------------------------------------------------------
> Try before you buy = See our experts in action!
> The most comprehensive online learning library for Microsoft developers
> is just $99.99! Visual Studio, SharePoint, SQL - plus HTML5, CSS3, MVC3,
> Metro Style Apps, more. Free future releases when you subscribe now!
> http://p.sf.net/sfu/learndevnow-dev2
> _______________________________________________
> Emc-users mailing list
> [email protected]
> https://lists.sourceforge.net/lists/listinfo/emc-users
------------------------------------------------------------------------------
Try before you buy = See our experts in action!
The most comprehensive online learning library for Microsoft developers
is just $99.99! Visual Studio, SharePoint, SQL - plus HTML5, CSS3, MVC3,
Metro Style Apps, more. Free future releases when you subscribe now!
http://p.sf.net/sfu/learndevnow-dev2
_______________________________________________
Emc-users mailing list
[email protected]
https://lists.sourceforge.net/lists/listinfo/emc-users
{kind=link}
{kind=link}