On Wednesday 11 January 2017 13:34:50 Peter C. Wallace wrote:
> On Wed, 11 Jan 2017, Jon Elson wrote:
> > Date: Wed, 11 Jan 2017 10:36:18 -0600
> > From: Jon Elson <[email protected]>
> > Reply-To: "Enhanced Machine Controller (EMC)"
> > <[email protected]>
> > To: "Enhanced Machine Controller (EMC)"
> > <[email protected]> Subject: Re: [Emc-users] Two
> > questions.
> >
> > On 01/10/2017 10:45 PM, Gene Heskett wrote:
> >> On Tuesday 10 January 2017 23:02:28 Jon Elson wrote:
> >>> On 01/10/2017 08:39 PM, Gene Heskett wrote:
> >>>> But if I hook up the halscope, the apparent quadrature error is
> >>>> worthless due to the 1KHz servo-loop timing limiting the
> >>>> bandwidth.
> >>>
> >>> Well, that's why we use hardware encoder counters, as
> >>> sampling the quadrature at 1 KHz just isn't fast enough.
> >>>
> >>> Jon
> >>
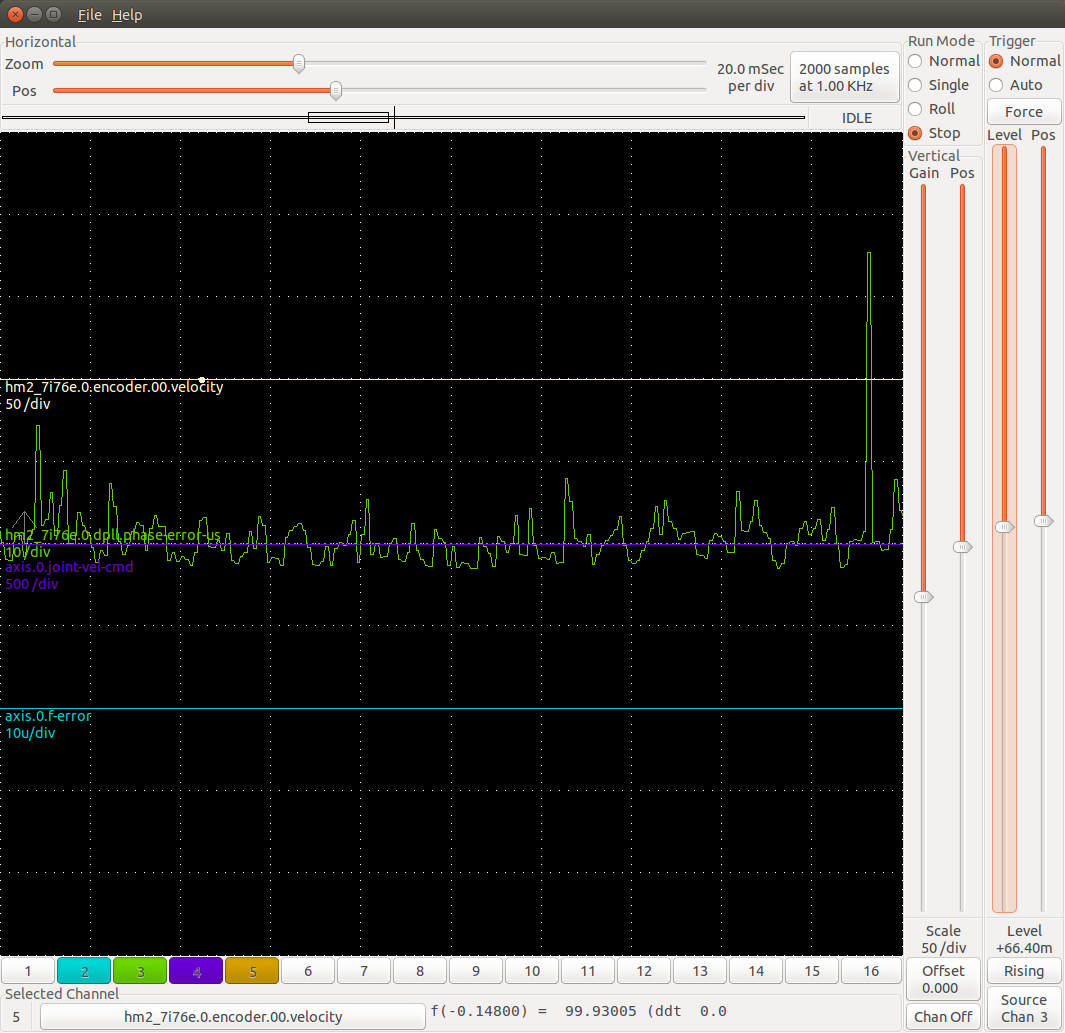
> >> Plz elucidate Jon. Something has got to be better than this. See
> >> the pix I posted with the last reply to Peter & the list. The top,
> >> white trace in the halscope screen is the quadrature noise, easily
> >> 10x the timing wibbles I see on the hitachi's screen.
> >
> > If you are looking at the quadrature signals at a 1 KHz
> > sampling rate, then unless the encoder is moving quite
> > slowly, the sampling will be too coarse. That screen shot
> > is kind of small (you can take just a single window as the
> > screenshot, by the way) but it looks like the duty cycle of
> > the encoders is not 50%. That may well be aliasing, as the
> > quadrature signals seem to be moving much too close to 1000
> > Hz. You'd get much better results below 100 Hz. Or, with
> > Mesa hardware, you can sample these with the base thread.
> >
> > I can't comment on the velocity output from the Mesa, as I
> > don't know their gear (or driver). But, the scale is 2/div,
> > meaning the scaled velocity output is jumping around 2 user
> > units up and down at a KHz rate. Clearly, not good.
> >
> > Jon
>
> The velocity output is calculated by using the number of counts
> divided by the time between the counts (time measured via a 1 MHz
> timestamp). If you have less than 2 counts per servo period the
> velocity estimation accuracy depends heavily the quadrature
> phase/symmetry since the edge spacing entirely determines the
> estimated velocity at this speed range.
>
> I suspect what Genes plot shows is that he has significant quadrature
> phase/symmetry errors at the FPGA inputs.
>
>
> Again here is a velocity plot of a accurate 100 Hz quadrature signal:
>
> http://freeby.mesanet.com/100_Hz_quadrature_velocity.png
I've not played with the stepgen type 2 yet, but I have adjusted the
quadrature a few thousandths and reduced it by about 1/3rd. Thats
helpfull as I can filter to smooth a tach dial once I have defeated the
noise.
But I have another concern. I have had to do a full powerdown reset to
clear a watchdog bite. The original config was I think intended to clear
it by re-enabling the machine, but I could not, so I disconnected that
reset in the hal file I started with as the logic was self feeding,
locking out the ability to reset the disabled machine. And I couldn't
even do it from the halconfig as it claimed another signal was driving
it when I tried to setp that pin.
Do you, Peter, have a logic diagram I can re-construct for that, that
actually works?
>
>
>
> Peter Wallace
> Mesa Electronics
>
> (\__/)
> (='.'=) This is Bunny. Copy and paste bunny into your
> (")_(") signature to help him gain world domination.
>
>
> ----------------------------------------------------------------------
>-------- Developer Access Program for Intel Xeon Phi Processors
> Access to Intel Xeon Phi processor-based developer platforms.
> With one year of Intel Parallel Studio XE.
> Training and support from Colfax.
> Order your platform today. http://sdm.link/xeonphi
> _______________________________________________
> Emc-users mailing list
> [email protected]
> https://lists.sourceforge.net/lists/listinfo/emc-users
Cheers, Gene Heskett
--
"There are four boxes to be used in defense of liberty:
soap, ballot, jury, and ammo. Please use in that order."
-Ed Howdershelt (Author)
Genes Web page <http://geneslinuxbox.net:6309/gene>
------------------------------------------------------------------------------
Developer Access Program for Intel Xeon Phi Processors
Access to Intel Xeon Phi processor-based developer platforms.
With one year of Intel Parallel Studio XE.
Training and support from Colfax.
Order your platform today. http://sdm.link/xeonphi
_______________________________________________
Emc-users mailing list
[email protected]
https://lists.sourceforge.net/lists/listinfo/emc-users
{kind=link}