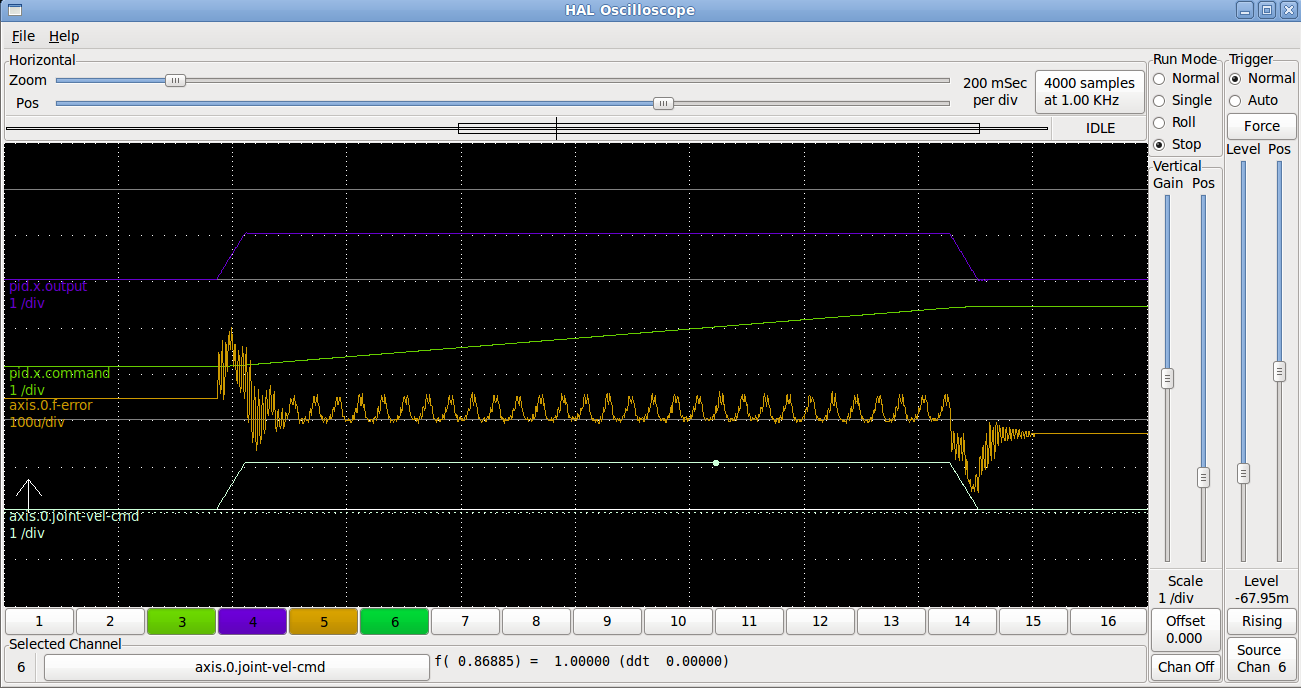
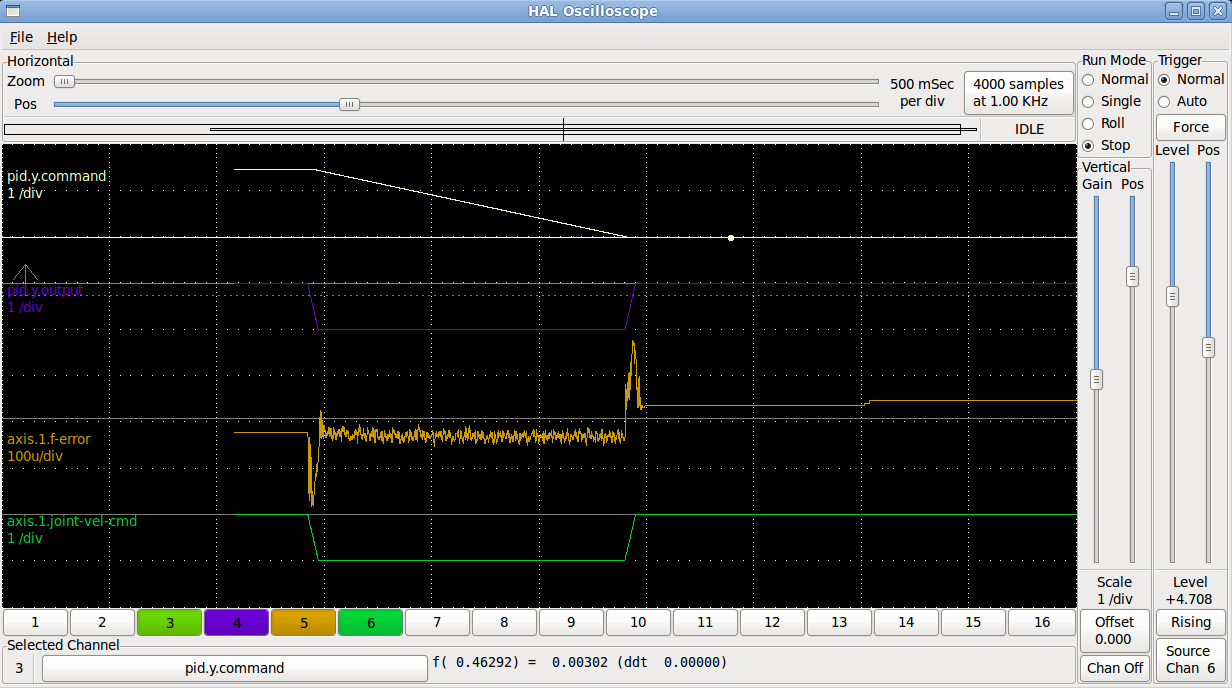
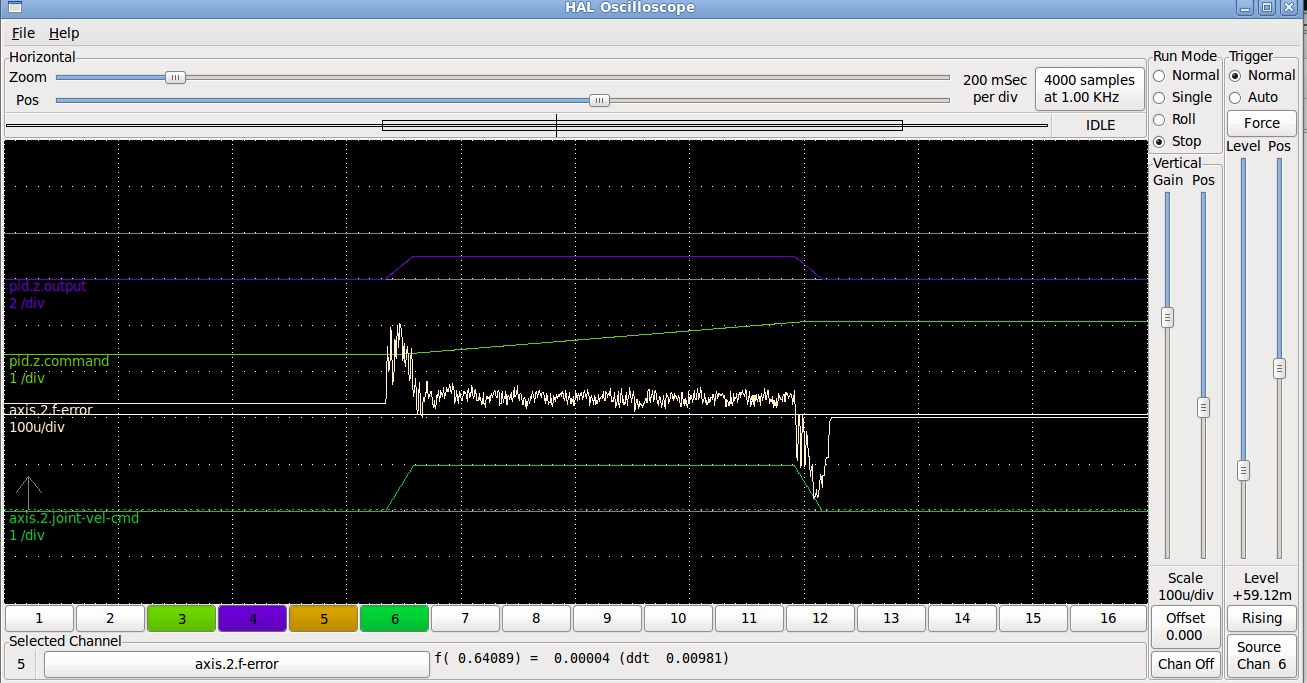
And for those following along at home, I got the machine set up in velocity mode and the pid tuned fairly well. The following error is less than .0002 and the machine runs very nicely, and I can now Home to the index pulse on the encoder (which is where this all began)! Yay.
Below are links to my .ini and .hal and plots of the f-error for each axis in case it helps someone in the future. Thanks, -Tom http://bgp.nu/~tom/pub/EMCO-CL.hal http://bgp.nu/~tom/pub/EMCO-CL.ini http://bgp.nu/~tom/pub/pid-X.png http://bgp.nu/~tom/pub/pid-Y.png http://bgp.nu/~tom/pub/pid-Z.png ------------------------------------------------------------------------------ Check out the vibrant tech community on one of the world's most engaging tech sites, Slashdot.org! http://sdm.link/slashdot _______________________________________________ Emc-users mailing list Emc-users@lists.sourceforge.net https://lists.sourceforge.net/lists/listinfo/emc-users
{kind=link}
{kind=link}
{kind=link}