Thanks for the info Jon. We are seeing a small (about 0.001) position error just on initial acceleration and deceleration that we cannot account for. It may be due to the encoder. Since this is mainly a plasma machine we will probably live with it. If we need to do better we'll look at replacing the encoders. We now know the string attached to our cheap encoder :-) -Tom
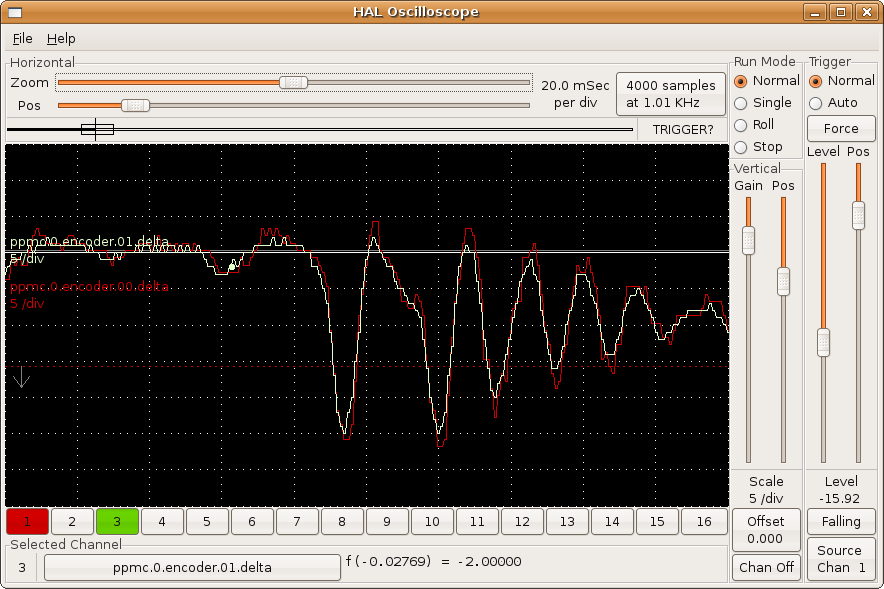
On Dec 13, 2011, at 12:21 AM, Jon Elson wrote: > Yes, that is EXACTLY the kind of problem I saw. This encoder is highly > interpolated, so > it has a tracking counter that is incremented or decremented by an > estimate of the current > velocity. If you don't do these computations correctly, there is a lag > in responding to > changes in velocity. As far as I can tell, the interpolator in such > devices as the Analog > Devices AD2S1200 has a really fine 2nd or 3rd order filter to make this > work well. > Obviously, CUI did not go to the trouble of such mathematics. > > After never being happy with these encoders and having a bit of customer > feedback, > I decided to compare to a standard HP optical encoder (with no > interpolation.) > So, I put the optical encoder on the other end of the motor, and fed > both to encoder > inputs on my PWM controller board. Most useful was to plot velocity > derived from > both encoders at the same time. This comes up often enough, I have the > plots > permanently on my web site. See > http://pico-systems.com/images/compare_encoder2.png > > The red trace is the CUI encoder, which was controlling the motor > (badly). The white > trace is the HP encoder. Both are providing 4000 counts/rev. You can > clearly see > the velocity peaks of the CUI encoder are higher, and if you look > closely at the > slopes, you can see the CUI is slow to react to velocity changes, and > then has to > overshoot significantly so the position can catch up. This of course > accounts for > the bad servo behavior. As the Halscope is set for 20 ms/div, the > velocity lag > is easily 3-5 ms in duration! > > If you have a plain optical encoder handy, you could easily set up the same > arrangement to compare the encoders. > > Jon ------------------------------------------------------------------------------ Systems Optimization Self Assessment Improve efficiency and utilization of IT resources. Drive out cost and improve service delivery. Take 5 minutes to use this Systems Optimization Self Assessment. http://www.accelacomm.com/jaw/sdnl/114/51450054/ _______________________________________________ Emc-users mailing list [email protected] https://lists.sourceforge.net/lists/listinfo/emc-users
{kind=link}